BibTeX
@inproceedings{10.1145/3680528.3687682,
author = {Je, Jihyeon and Liu, Jiayi and Yang, Guandao and Deng, Boyang and Cai, Shengqu and Wetzstein, Gordon and Litany, Or and Guibas, Leonidas},
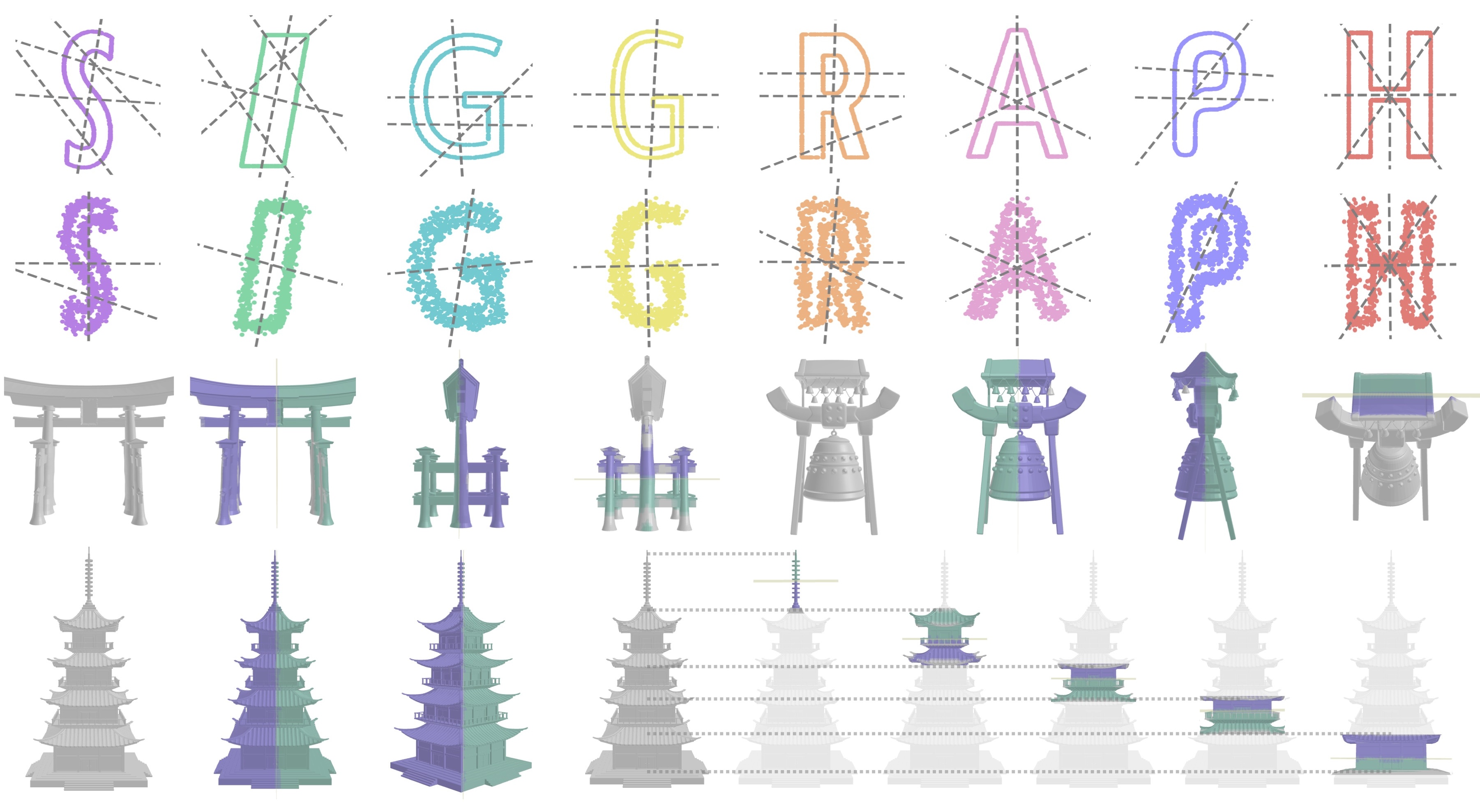
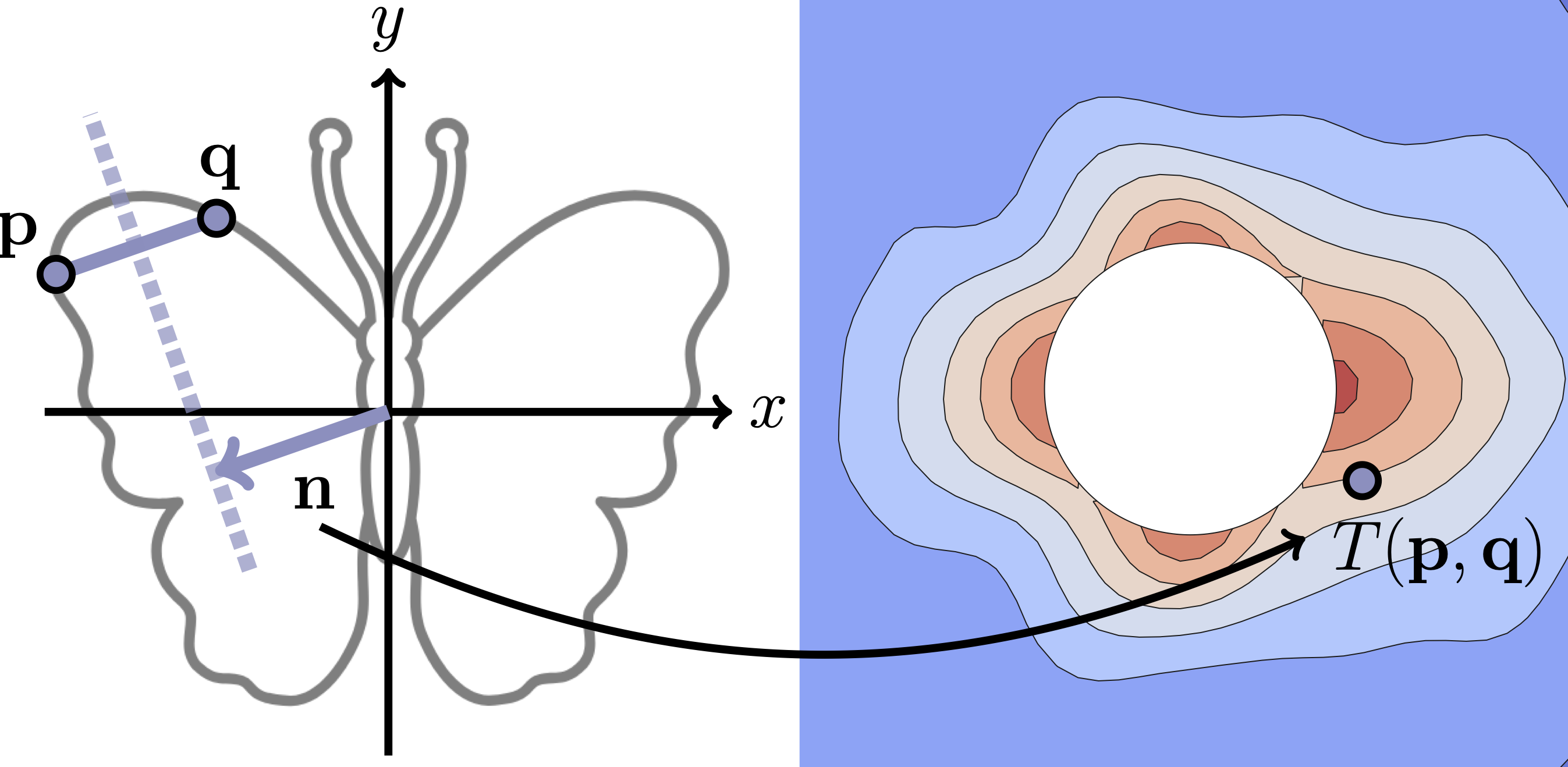
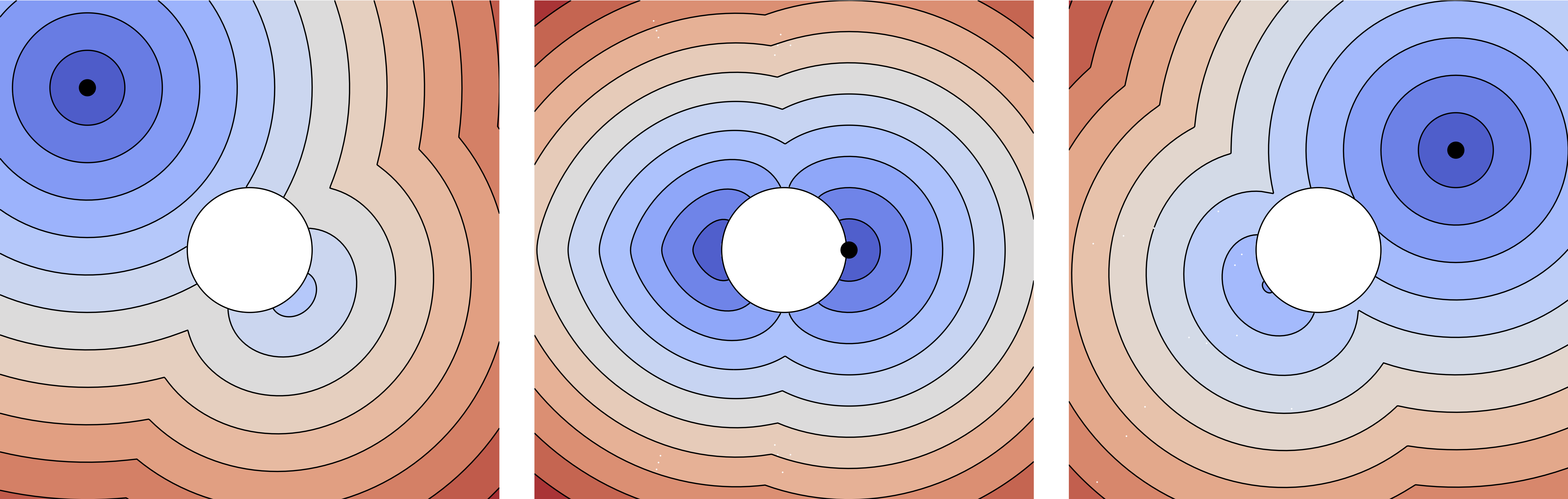
title = {Robust Symmetry Detection via Riemannian Langevin Dynamics},
year = {2024},
isbn = {9798400711312},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
url = {https://doi.org/10.1145/3680528.3687682},
doi = {10.1145/3680528.3687682},
booktitle = {SIGGRAPH Asia 2024 Conference Papers},
articleno = {91},
numpages = {11},
keywords = {Geometry Processing, Generative Modeling, Langevin Dynamics},
location = {Tokyo, Japan},
series = {SA '24}
}